Vehicle Detection under Adverse Weather Conditions
Explore the cutting-edge techniques we use to build a comprehensive dataset and train a machine learning model for Vehicle Detection in Adverse Weather Conditions—ensuring robust perception even in the most challenging driving environments.
The recently advance on Artificial Inteligence (AI) has been crutial for the autonomous vehicles development. The human eye is capable of seeing a scene and quickly detecting people, signs or vehicles as well as their position and movement. The AI goal is to create different models able to detect these obstacles in a similar way that a human does, thereby enabling an almost total autonomous driving. Nowadays, there are different approaches to this problematic. However, these solutions do not consider different scenarios, and therefore when the weather conditions are adverse, they are not accurate.


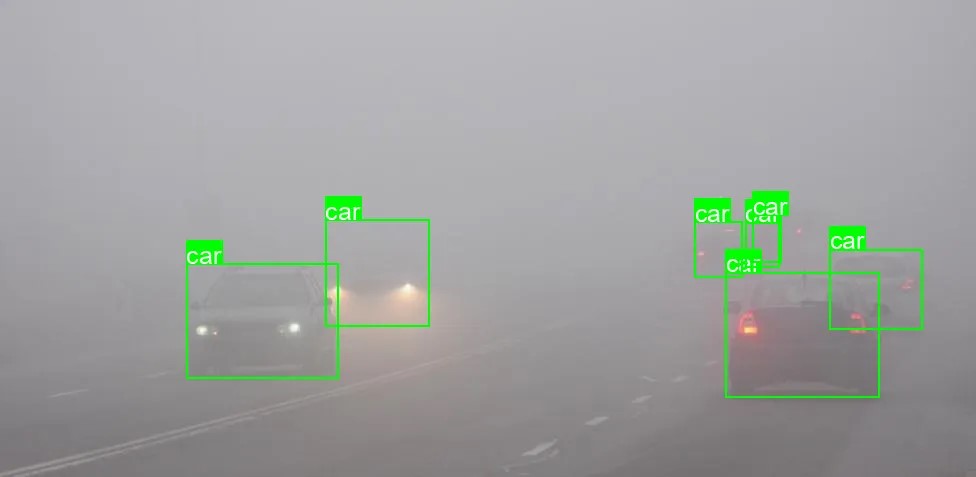
These two examples have been generated using YOLO, from the Ultralytics library in Python.
As already mentioned in the Gestual Recognition to Support Driving post, another important aspect of AI is the generation os alternative scenarios. To achieve a good vehicle detection under adverse weather conditions, we have created a dataset combining different existing datasets and generating synthetic fog in others. With this new dataset, we trained various cutting-edge models improving significantly the vehicle detection in heavy rain, fog or snow conditions.